HomeType Parameter
Default Value: 4
Minimum Value: 0
Maximum Value: 6
Units: None
Type: int
This table shows the value of the configuration for the parameter setting.
Table: Parameter Settings, Configurations, and Values
| Setting | Configuration | Value |
|---|---|---|
|
Home Type |
Past Limit to Marker |
0 |
|
To Limit and Reverse to Marker |
1 |
|
|
To Marker Only |
2 |
|
|
To Limit Only |
3 |
|
|
At Current Position |
4 |
|
|
At Current Position Feedback |
5 |
|
|
At Current Position Absolute |
6 |
Use the HomeType parameter to specify which procedure is used to determine the home position of the axis.
The HomeSpeed Parameter sets the speed of all homing-related motion. The HomeRampRate Parameter sets the acceleration and deceleration rates.
If you are using a gantry under Decoupling Control:
- You must set the HomeType parameter to the same value on the two gantry axes.
- Aerotech recommends that you set the HomeType parameter as To Limit and Reverse To Marker.
The sections that follow tell you more about the procedure used for each home-type configuration.
IMPORTANT: Virtual Axes will behave as if the At Current Position configuration is specified for the HomeType parameter. If you use virtual axes and specify a different configuration for this parameter, it has no effect.
IMPORTANT: Use this configuration only when the Limit Type setting of the HomeSetup Parameter is set to Use Home Limit Switch.
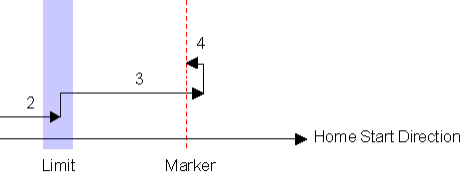
When you select this home type, the procedure that follows will occur:
- If the limit input is currently active, the axis moves out of the limit condition. To do this, the axis moves in the direction opposite of that specified by the Home Start Direction setting of the HomeSetup Parameter. After the limit condition is cleared, the axis decelerates to a stop. If the limit input is not active, no motion occurs during this step.
- The axis moves toward the limit by moving in the direction specified by the Home Start Direction setting of the HomeSetup parameter. This movement continues until the limit input becomes active. Then the axis decelerates to a stop.
- The axis starts to move again in the same direction as the previous move. It continues until the marker input becomes active. Then the position of the marker is latched in the hardware and the axis decelerates to a stop.
- The axis moves back to the position at which the marker was latched. If a nonzero value is set for the HomeOffset Parameter, the axis moves the specified distance from where the marker was latched.
- The position command and the program position command are set to the value specified by the HomePositionSet Parameter.
Figure: Past Limit to Marker Motion Diagram
IMPORTANT: For home types that use limit switches to operate correctly, you must select the CW/Positive End-of-Travel Limit Fault and CCW/Negative End-of-Travel Limit Fault bits in the FaultMask Parameter. If you do not select these bits, the limit switches are ignored and the home cycle does not complete successfully.
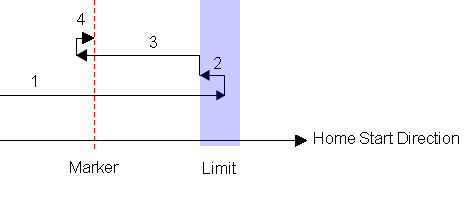
When you select this home type, the procedure that follows will occur:
- The axis moves toward the limit by moving in the direction specified by the Home Start Direction setting of the HomeSetup Parameter. This movement continues until the applicable limit input becomes active. Then the axis decelerates to a stop.
- The axis moves out of the limit by moving in the opposite direction of the previous move. After the limit condition is cleared, the axis decelerates to a stop.
- The axis starts to move again in the same direction as the previous move. It continues until the marker input becomes active. Then the position of the marker is latched in the hardware and the axis decelerates to a stop.
- The axis moves back to the position at which the marker was latched. If a nonzero value is set for the HomeOffset Parameter, the axis moves the specified distance from where the marker was latched.
- The position command and the program position command are set to the value specified by the HomePositionSet Parameter.
Figure: To Limit and Reverse to Marker Motion Diagram
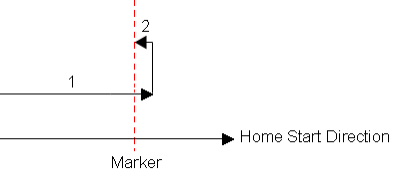
When you select this home type, the procedure that follows will occur:
- The axis starts to move in the direction specified by the Home Start Direction setting of the HomeSetup Parameter. It continues until the marker input becomes active. Then the position of the marker is latched in the hardware and the axis decelerates to a stop.
- The axis moves back to the position at which the marker was latched. If a nonzero value is set for the HomeOffset Parameter, the axis moves the specified distance from where the marker was latched.
- The position command and the program position command are set to the value specified by the HomePositionSet Parameter.
Figure: To Marker Only Motion Diagram
IMPORTANT: Aerotech does not recommend the To Limit Only configuration for most systems. The repeatability of the home position as defined by end-of-travel electrical limit switches is typically not as repeatable as one of the configurations that uses a dedicated home marker. Use this configuration only if there is no home marker on the axis.
IMPORTANT: For home types that use limit switches to operate correctly, you must select the CW/Positive End-of-Travel Limit Fault and CCW/Negative End-of-Travel Limit Fault bits in the FaultMask Parameter. If you do not select these bits, the limit switches are ignored and the home cycle does not complete successfully.
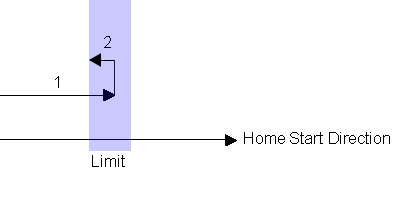
When you select this home type, the procedure that follows will occur:
- The axis moves toward the limit by moving in the direction specified by the Home Start Direction setting of the HomeSetup Parameter. This movement continues until the applicable limit input becomes active. Then the axis decelerates to a stop.
- The axis moves out of the limit by moving in the opposite direction of the previous move. After the limit condition is cleared, the axis decelerates to a stop.
- If a nonzero value is set for the HomeOffset Parameter, the axis moves the specified distance from this location.
- The position command and the program position command are set to the value specified by the HomePositionSet Parameter.
Figure: To Limit Only Motion Diagram
When you select this home type, the position command and the program position command are set to the value specified by the HomePositionSet Parameter. If there is any quantity of position error at the time of homing, it is maintained. When you use this home type, no motion occurs (which includes offset moves specified by the HomeOffset Parameter).
When you select this home type, the position command, position feedback, and the program position command are set to the value specified by the HomePositionSet Parameter. If there is any quantity of position error at the time of homing, it will be cleared. When you use this home type, no motion occurs (which includes offset moves specified by the HomeOffset Parameter).
IMPORTANT: Because the position error is immediately cleared, this configuration might cause unexpected motion if there is a large quantity of position error at the time of homing. Use the At Current Position Feedback configuration only when the position error is small.
When you select this home type, the system does the procedure that follows:
- No motion occurs during homing. Also, the HomeOffset Parameter has no effect.
- The position command and the program position command are set to the absolute position of the axis. If there is any quantity of position error at the time of homing, it is maintained.
- The controller applies an offset to the position command and the program position command. The applied offset value is the same as the value of the HomePositionSet Parameter. No motion occurs when this offset is applied. The offset is applied because the HomePositionSet Parameter defines the position that the controller reports when the absolute position of the axis is at 0.0.
The type of system configuration determines if the controller automatically homes the axis or if you must explicitly home the axis:
- If the axis is not part of a gantry under Decoupling Control, the controller automatically homes the axis the first time you enable the axis.
- If the axis is part of a gantry under Decoupling Control, the controller will not automatically home the axis. You must explicitly home the axis.



