Over Current Fault
An OverCurrentFault occurs when the average motor current is more than the value specified in the AverageCurrentThreshold Parameter and the AverageCurrentTime Parameter.
For an OverCurrentFault to occur, the axis must be enabled, and the OverCurrentFault box must be selected in the FaultMask Parameter. Because the OverCurrentFault helps prevent high currents from damaging your equipment, Aerotech recommends that the OverCurrentFault is enabled at all times.
Table: OverCurrentFault Causes and Solutions
| Cause | Examine Your System | Solution |
|---|---|---|
|
Servo Tuning |
The servo is unstable and goes into a fault condition when the stage is enabled or trying to move. When this occurs, there is usually a noise or sudden movement. |
|
|
Mechanical Restriction |
|
|
|
System Capability |
The fault occurs during a fast sequence of moves or continuous moves. |
|
|
Electrical Wiring or Configuration Incorrect |
|
|
|
Mechanical Component Failure |
|
|
|
Parameter or Calibration File Settings |
|
|
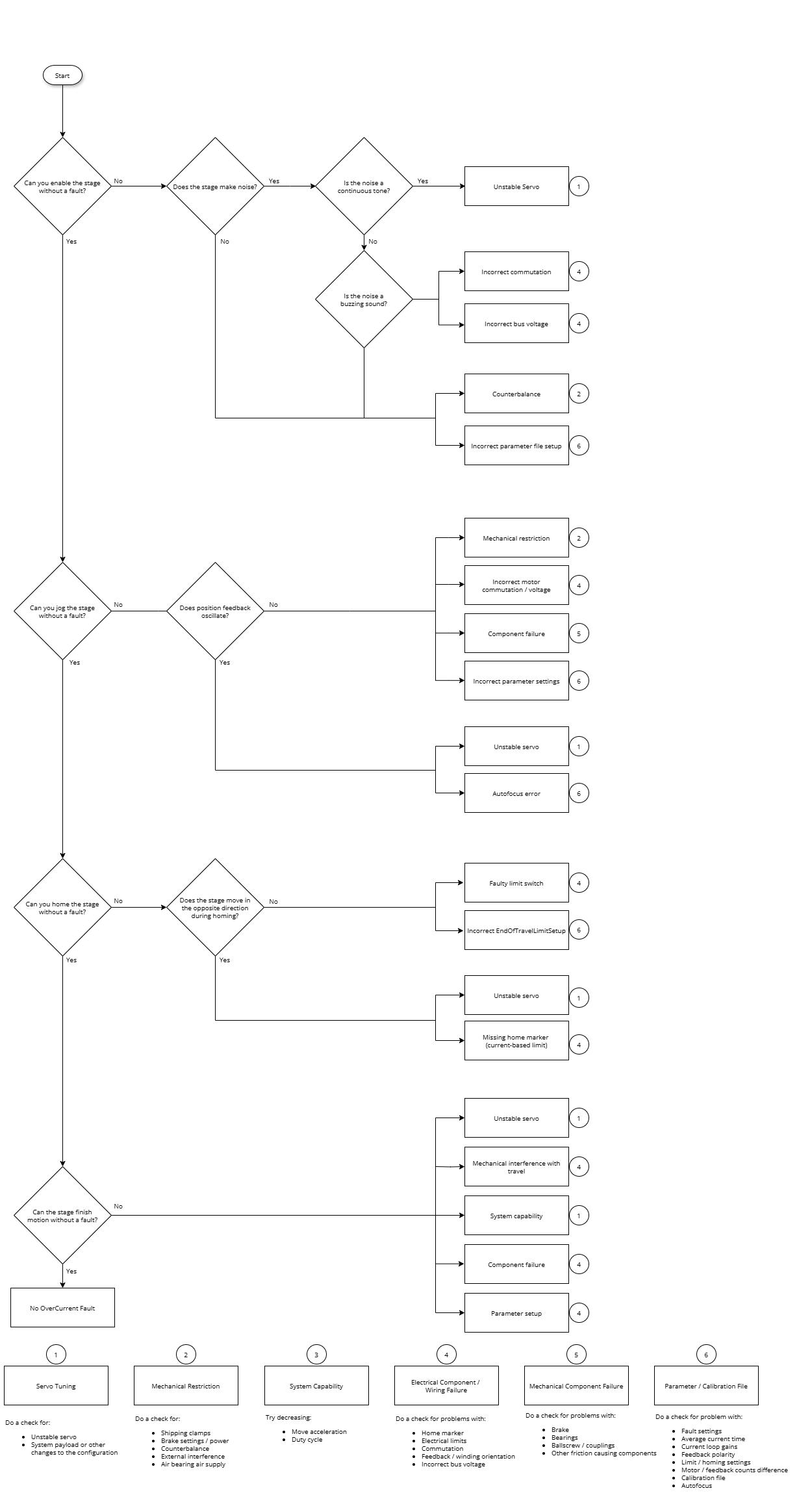
Use the chart in the drop-down that follows to help you find the cause of the fault.