TrajectoryFirFilter Parameter
Default Value: 0
Minimum Value: 0
Maximum Value: 5001
Units: None
Type: int
WARNING: This parameter can introduce errors in the programmed path of coordinated moves because it can change the position of an axis relative to another axis.
IMPORTANT: This parameter causes the controller to delay the motion trajectory of an axis, but does not delay I/O Functions and More PSO Functions on that axis. To compensate for the motion trajectory delay, use the DriveOutputCommandDelay Parameter to delay I/O functions and PSO functions.
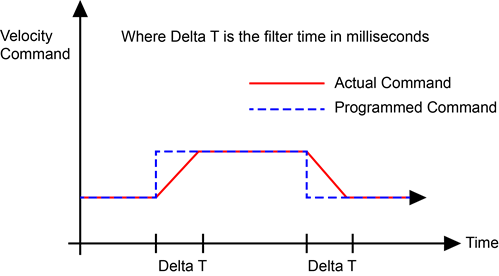
Use the TrajectoryFirFilter parameter to enable and configure a first-order Finite Impulse Response (FIR) filter that is applied to the motion trajectory. The value of this parameter sets the number of taps that the moving average filter uses. A value of zero deactivates the filtering, while larger values produce more filtering.
This filter is a boxcar type filter where each filter tap is weighted equally. The controller applies the filter at a rate that corresponds to the drive type of the specified axis. For more information, refer to the table that follows.
Table: FIR Filter Application Rates
| Drive Type | FIR Filter Application Rate |
|---|---|
|
Servo Axis |
20 kHz |
|
Galvo Axis |
100 kHz |
To find the correct value to set for this parameter, use the applicable equation.
Servo Axis

Galvo Axis




