DefaultCoordinatedAccelLimit Parameter
Default Value: 0.0
Minimum Value: 0.0
Maximum Value: None
Units: dominant acceleration
Type: double
IMPORTANT: This parameter applies only when you use rate-based ramping. For more information about ramping, refer to the Coordinated Motion section of Motion Setup Functions.
The DefaultCoordinatedAccelLimit parameter specifies the maximum acceleration of all dominant axes at non-tangent locations of a motion path. A non-tangent location occurs when two coordinated moves meet at a non-tangent angle. If you specify a nonzero value for this parameter, the controller decreases the speed of coordinated motion, such as MoveCcw(), MoveCw(), and MoveLinear() functions, before the non-tangent location. Thus, the controller makes sure that the accelerations of all dominant axes at the non-tangent location are at or below the DefaultCoordinatedAccelLimit value.
By default, the DefaultCoordinatedAccelLimit parameter causes the controller to decrease the speed of coordinated moves to a lower speed that is nonzero. To make sure that the controller always decreases the speed of coordinated moves to zero, change the setting of the CoordinatedAccelLimitSetup Parameter to Decel to Zero Velocity.
The
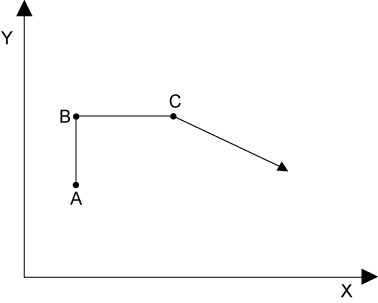
For Example - Limiting Axis Acceleration to a Nonzero Speed
Point B is a non-tangent location (90° angle). The DefaultCoordinatedAccelLimit parameter causes the controller to decrease the coordinated speed from point A to point B in order to prevent an over-acceleration of X and Y at point B.
Point C is also a non-tangent location (30° angle). The DefaultCoordinatedAccelLimit parameter causes the controller to decrease the coordinated speed from point B to point C in order to prevent an over-acceleration of X and Y at point C.
Because the angle at point B is greater than the angle at point C, the coordinated speed is less at point B than it is at point C.
Motion Path with Non-Tangent Locations
IMPORTANT: You must reset the controller for these changes to have an effect.



