Frequency Response Module
You can use the Frequency Response module to analyze the characteristics of the servo loop to examine the axis stability and dynamic performance. The Frequency Response module is the most advanced servo tuning tool in Automation1. It requires more input from you than the other tools. If you want to achieve the highest possible dynamic performance across a wide range of different move profiles, Aerotech recommends that you use this tool. You can find this module in the
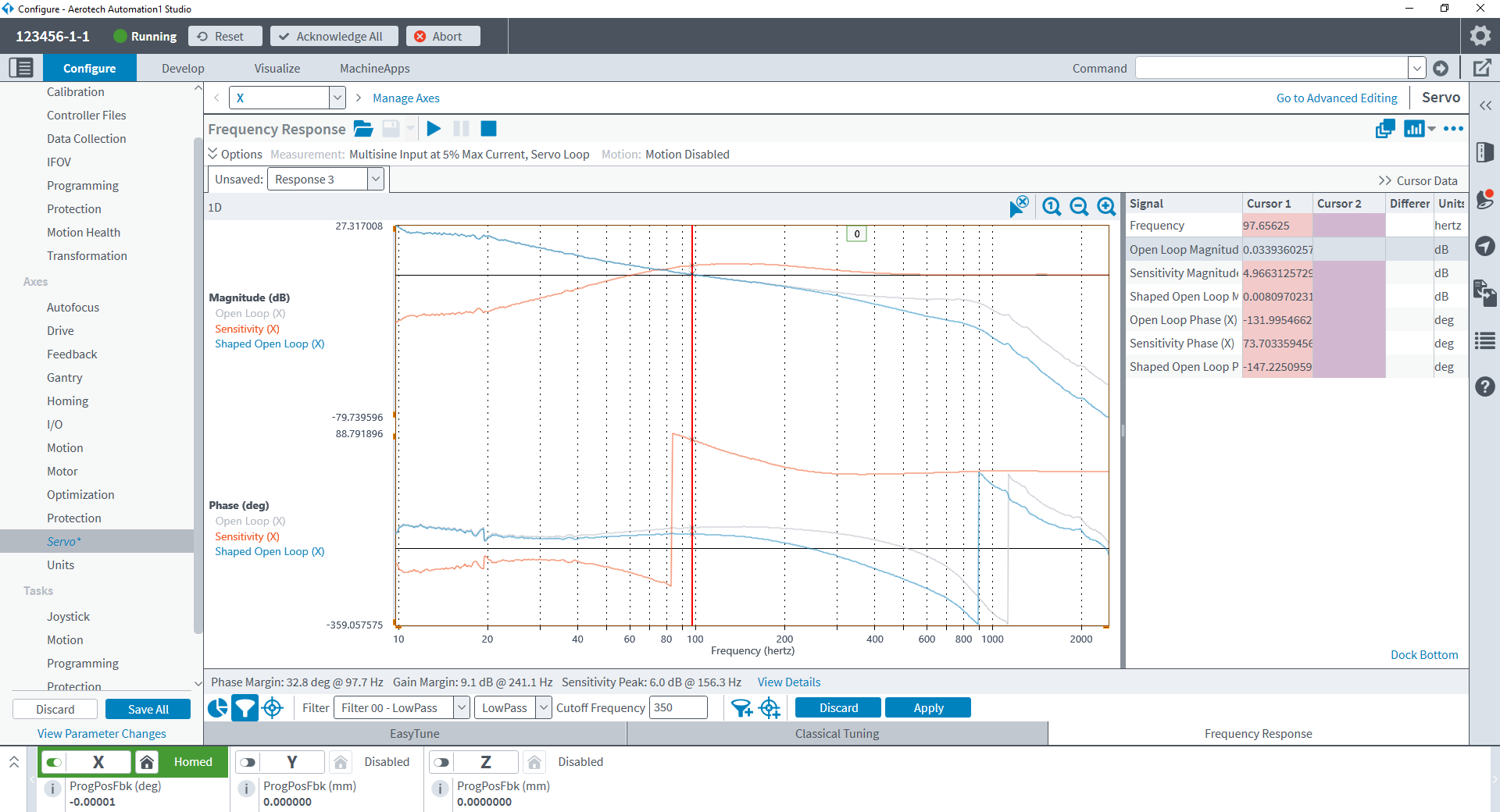
Frequency Response Measurement
A frequency response lets you make an analysis of the dynamic behavior of the servo loop in the frequency domain. You can also make an estimate of how changes to the servo parameters will have an effect on that behavior.
IMPORTANT: Before you use the Frequency Response module, the axis that you select must be stable.
- In the Axes category of Automation1 Studio, select the Servo topic. Then make sure that you are in the Basic Editing mode.
- Select the Frequency Response module.
- At the top of the module, click the drop-down arrow to select the axis that you want to configure.
- In the Measurement Options toolbar, configure the Input Type, Start Frequency (Hz), End Frequency (Hz), frequency spacing, and the % Max Current. Based on the Input Type that you use, frequency spacing is the Number of Periods, Divisions, Averages, or Points.
- The default values for MultisinePlus are 10 Hz for the Start Frequency (Hz) and 1000 Hz for the End Frequency (Hz). Make sure that the End Frequency (Hz) is less than or equal to half of the servo update frequency.
- Start with the default amplitude that the application uses. If you find one or more points that are not valid in the final frequency response plot, you can increase the disturbance amplitude from the default value. The amplitude of the disturbance that is injected into the loop is shown in the application as one of the values that follow:
- A percentage of the maximum rated current of the controller, which is % Max Current.
- A percentage of the maximum rated voltage of the controller, which is % Max Voltage.
- A distance, which is Amplitude (mm).
- If your axis has high friction or a coarse-resolution position encoder, toggle the Enable Motion slider
 to move the axis in the forward or reverse direction based on the motion parameters. Then configure the Travel Distance (primary units) and Travel Speed (primary units / second) in the Motion Options toolbar.
to move the axis in the forward or reverse direction based on the motion parameters. Then configure the Travel Distance (primary units) and Travel Speed (primary units / second) in the Motion Options toolbar. - Click the Start Frequency Response Measurement button
 and wait for the measurement to complete.
and wait for the measurement to complete.
Tip: Aerotech recommends that you the MultisinePlus input type.
Servo Gains and Servo Filters
Tip: You can also set important Servo Gains and Servo Filters related to loop shaping by using the Loop Shaping toolbar. Refer to the Shape Existing Responses section of this guide for more information.
- In the Axes category of Automation1 Studio, select the Servo topic. Then make sure that you are in Basic Editing mode.
- Select the Frequency Response module.
- At the top of the module, click the drop-down arrow to select the axis that you want to configure.
- Select a target value for open-loop magnitude crossover frequency and the phase margin.
- On the top-right corner of the application, click the Plot Options button
 . On the Response Types menu, select Open Loop and Sensitivity.
. On the Response Types menu, select Open Loop and Sensitivity. - On the bottom-left corner of the application, click the Edit servo loop filters button
 to change to the servo filter editing toolbar. When you adjust servo gains or servo filters in the frequency response editing toolbar, the Frequency Response module simulates the effects of the servo parameter changes without applying them to the axis.
to change to the servo filter editing toolbar. When you adjust servo gains or servo filters in the frequency response editing toolbar, the Frequency Response module simulates the effects of the servo parameter changes without applying them to the axis. - Set the Cutoff Frequency of the Filter 00 - LowPass filter to a value that is 8 - 15x the target crossover frequency.
- On the bottom-left corner of the application, click the Edit Servo Loop Gains button
 to change to the servo gain editing toolbar.
to change to the servo gain editing toolbar. - Click the magnitude loop-shaping arrows

 to adjust the open-loop magnitude until the shaped open-loop magnitude crossover frequency is the same as your target crossover frequency.
to adjust the open-loop magnitude until the shaped open-loop magnitude crossover frequency is the same as your target crossover frequency. - Use the phase loop-shaping arrows to adjust the reported phase margin until it is the same as your target phase margin.
- If the reported sensitivity peak is above 6 dB or if the response shows encirclement, Aerotech recommends that you decrease your target crossover frequency. You can also increase the target phase margin if necessary. If the sensitivity peak or encirclement occurred because of a mechanical resonance, you can try to decrease the sensitivity peak with a servo filter. To do this, apply a notch filter at the resonant frequency to attenuate the open-loop magnitude.
- To apply the servo parameter values to the controller, click the Apply button at the bottom of the application.
- Do one more frequency response measurement. Then make sure that the Crossover Frequency, Phase Margin, and Sensitivity Peak are the same as the approximate values from the previous measurement.
- When the performance of the selected axis is satisfactory, click the Save All button on the bottom-left corner of the application. This makes sure that the updated parameters will have an effect after the next controller reset.
Tip: For information about applicable target values for a range of mechanical devices, refer to the Selecting a Maximum Target Crossover Frequency section of this guide. A phase margin in the range of 32 degrees to 45 degrees is permitted for most conditions.
Feedforward Parameters
Tip: You can also set important Feedforward Gains and Feedforward Filters related to loop shaping by using the Loop Shaping toolbar. Refer to the Shape Existing Responses section of this guide for more information.
Feedforward gains do not change the axis stability. Before you adjust the feedforward parameters, set the servo parameters to get your target stability margins.
- In the Axes category of Automation1 Studio, select the Servo topic. Then make sure that you are in the Basic Editing mode.
- Select the Frequency Response module.
- At the top of the module, click the drop-down arrow to select the axis that you want to configure.
- On the top-right corner of the application, click Go to Advanced Editing to see all of the servo parameters.
- Find the Feedforward section. Record the current value for the FeedforwardAdvance (ms) parameter.
- Find the Feedforward Gains section. Record the current value for the FeedforwardGainAff parameter.
- On the top-right corner of the application, click Go to Basic Editing to go back to the Frequency Response module.
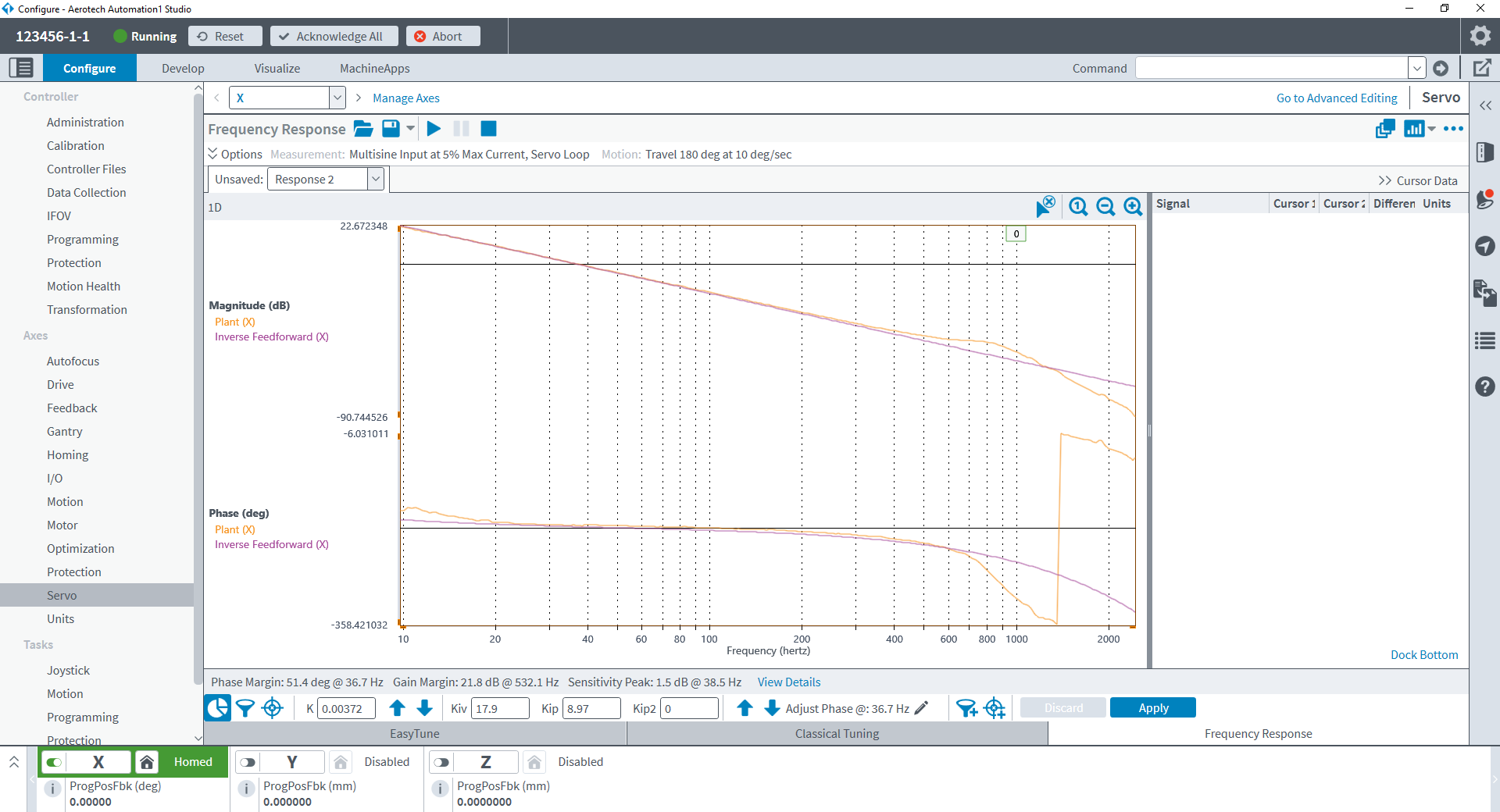
- On the top-right corner of the application, click the Plot Options button . On the Response Types menu, select Plant and Inverse Feedforward.
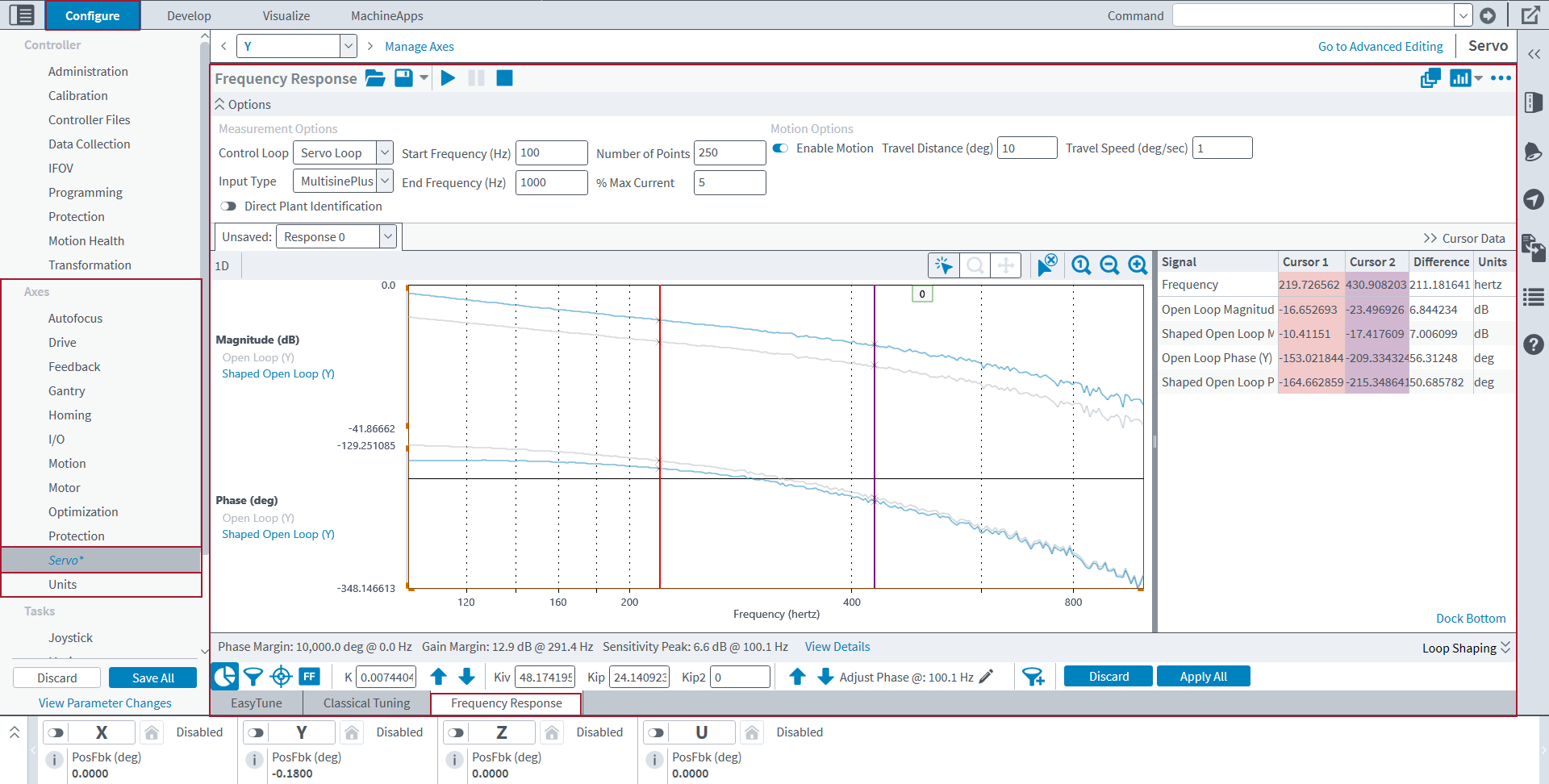
- Highlight a frequency that is between 1/3 and 1/2 of the open-loop magnitude crossover frequency, where the slopes of the plant response and inverse feedforward response are almost the same. Refer to the steps that follow.
- Click the part of the plot that you want to see. A red vertical line comes into view at that frequency.
- Expand the
 Cursor Data section that follows the plot to see the values of the frequency response at that frequency. The plant response of axes with high friction might be different from the inverse feedforward response at low frequencies and become flattened because of a phenomenon known as a Dahl resonance.
Cursor Data section that follows the plot to see the values of the frequency response at that frequency. The plant response of axes with high friction might be different from the inverse feedforward response at low frequencies and become flattened because of a phenomenon known as a Dahl resonance. - Calculate a new value for the
- Use the data Cursor to highlight a frequency that is near the open-loop magnitude crossover frequency. Then calculate a new value for the
- On the top-right corner of the application, click Go to Advanced Editing to see all of the servo parameters.
- Enter the new values that you calculated for the FeedforwardAdvance (ms) and FeedforwardGainAff parameters.
- On the bottom-left corner of the application, click the Save All button. This makes sure that the parameter changes will have an effect after the next controller reset.
- Measure the frequency response again. Then make sure that the Plant and Inverse Feedforward responses are the same at low frequencies when the slopes are similar.

Where:
AffOld is the current value of the FeedforwardGainAff Parameter.
InvFF is the Inverse Feedforward magnitude in dB.
Plant is the Plant magnitude in dB.

Where:
FFAdvOld is the current value of the FeedforwardAdvance Parameter.
InvFF is the Inverse Feedforward phase in degrees.
Plant is the Plant phase in degrees.
FreqHz is the highlighted frequency in Hz.
IMPORTANT: You must reset the controller to apply the parameter changes. After you click the Save All button, Automation1 will ask you to reset the controller.
Shape Existing Responses
You can use the Loop Shaping toolbar at the bottom of the module to adjust gains and filters when working with a collected response or opened frequency response plot file. When you make adjustments with the Loop Shaping toolbar, you can see the results immediately on a shaped version of the affected response. This lets you see minor changes to a select set of the most relevant parameters without having to apply the changes to the controller or collect more responses.
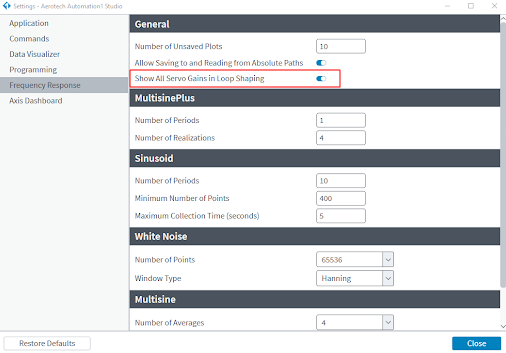
You can show and adjust servo loop and feedforward parameter values in the first tab of the toolbar. To do this, click the Settings button  on the top-right corner of the application. On the Settings menu, select Frequency Response. In the General section, enable the Show All Servo Gains in Loop Shaping setting.
on the top-right corner of the application. On the Settings menu, select Frequency Response. In the General section, enable the Show All Servo Gains in Loop Shaping setting.
Editing Servo Loop Gains
The first tab in the Loop Shaping toolbar, by default, lets you adjust the values of:
When the Show All Servo Gains in Loop Shaping setting is enabled, you can also adjust:
Changes to these values are in the Shaped Open Loop Response. They are plotted only when the parameter changes cause a response that is different from the open-loop response that was initially collected.
You can use the up and down arrow buttons to shift the magnitude of the response or the phase at which the magnitude crossover occurs.
Editing Servo Loop Filters
The second tab in the Loop Shaping toolbar lets you set new servo loop filters or edit existing servo loop filters. Only a single filter can be seen and edited at a time, but all listed filters are applied to the resulting open-loop-shaped response.
Servo loop filters that are important to your project can also be calculated by using the Auto-Fit Servo Loop Filters button  . This auto-fit tries to remove any resonance peaks that are part of the existing response.
. This auto-fit tries to remove any resonance peaks that are part of the existing response.
Editing Feedforward Gains and Filters
The last tab in the Loop Shaping toolbar lets you adjust feedforward gains and filters to shape the feedforward response.
By default, you can adjust the values of the parameters that follow on this tab:
When the Show All Servo Gains in Loop Shaping setting is enabled, you can also adjust:
Changes to these values are in the Shaped Feedforward Response. They are plotted only when the parameter changes cause a response that is different from the feedforward response that was initially collected. To show the feedforward response, click the Plot Options button . On the Response Types menu, select Feedforward.
Applying Shaped Gains and Filters
You can do loop shaping on a response that you collected on the current controller or on a Frequency Response file that you open. The new set of gains and filters can be applied to the controller from the Loop Shaping toolbar. They will be applied to the axis that is selected in the Configure workspace. Use the Apply All button to stage the new parameter values from all available shaping tabs. You can view, save, or discard these changes the same as you do for any changes made directly to parameter editors. When you discard the changes, the gains will go back to their initial values from when the response was collected.
When you apply loop shaping parameters from a Frequency Response file that you open, the module does a check to see if the axis of the response is the same as the axis to which you are applying the parameters. If the axes are not the same or the module does not know if they are, the module will show a warning. Then you can make a decision about if you want to apply the parameters or not. If the axes are the same, the module will not show a warning and will apply the parameters.
Advanced Tips
Notch Filtering of Mechanical Resonances
If an axis has a mechanical resonance that causes an unwanted peak in the magnitude of the sensitivity response, you can decrease the magnitude of the open-loop response near the resonant frequency. To do this, add a notch filter. A notch filter will decrease the magnitude of the open-loop response only near its center frequency.
- In the Axes category of Automation1 Studio, select the Servo topic. Then make sure that you are in the Basic Editing mode.
- Select the Frequency Response module.
- At the top of the module, click the drop-down arrow to select the axis that you want to configure.
- On the bottom-left corner of the application, click the Edit servo loop filters button to change to the servo filter editing toolbar.
- On the Filter drop-down menu, select an empty filter slot.
- Change the filter type from None to Notch.
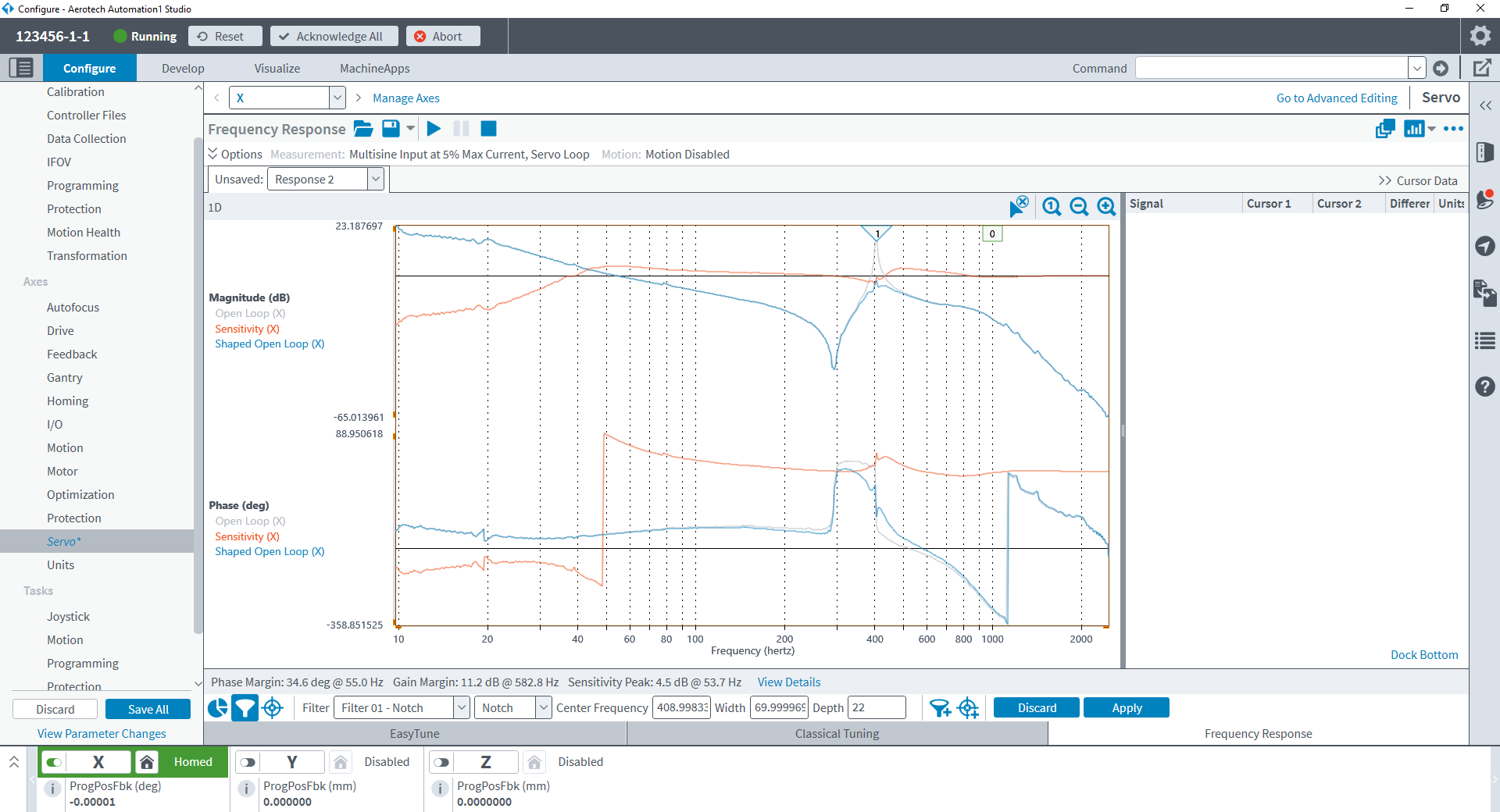
- Use the cursor to find the frequency of the resonance peak. Set the Center Frequency to this value.
- Adjust the filter Width and Depth until the magnitude of the resonance peak is flattened and is level with the surrounding response. To minimize the impact of the filter on the open-loop phase, set the Width to the smallest value that can give you this result.
- To apply the servo parameter values to the controller, click the Apply button.
In the image that follows, the notch filter decreased the sensitivity peak from 8 dB to below 4.5 dB. The filter did not have an effect on the open-loop magnitude crossover frequency.
Low-Pass Cutoff Frequency Placement
If an axis has a fine-resolution encoder and your application requires a very high dynamic performance, you can increase the cutoff frequency of the low-pass filter. A higher cutoff frequency does not attenuate high-frequency noise with a strong effect. But it might be easier for you to get your target phase margin at a high-magnitude crossover frequency.
If you measure a frequency response and it is not smooth at high frequencies, you can decrease the cutoff frequency of the low-pass filter. A lower cutoff frequency will attenuate high-frequency noise with a strong effect and can decrease the magnitude of the sensitivity response at those higher frequencies. But if you lower the cutoff frequency, your phase margin will also decrease. The plot that follows shows you the changes to the shaped open-loop response when the low-pass filter cutoff frequency is lowered from 1,000 Hz (unshaped) to 350 Hz (shaped).
Coarse-resolution position encoders can inject abrupt step changes into the servo loop, which can excite mechanical resonances or cause an unwanted whining sound. If an axis has a coarse-resolution position encoder, you can decrease the cutoff frequency of the low-pass filter. This smooths out the effect that these step changes will have on the feedback control effort.
Overlap Multiple Plots
For some axes, the plant response will change based on different operating conditions. These conditions include the position in travel and the locations of other axes. On the top-right corner of the application, click the Overlap button  to overlap two or more frequency response plots. Then you can examine the stability and dynamic performance across different operating conditions at the same time.
to overlap two or more frequency response plots. Then you can examine the stability and dynamic performance across different operating conditions at the same time.
If you overlap frequency response plots, you can use loop shaping only when all of the responses have the same servo gains and filters. Loop shaping changes apply to all of the overlapped responses.
Servo Filter Indicators
There is a small icon at each filter frequency above the Magnitude plot that shows the type of filter and the filter number. Low Pass filters are represented by a green rectangle  . Notch filters are represented by a blue triangle
. Notch filters are represented by a blue triangle  . Lead-Lag and Resonant filters are represented by a black ellipse
. Lead-Lag and Resonant filters are represented by a black ellipse  .
.
Select the Correct Sensitivity Peak
For most applications, a maximum sensitivity peak of 6 dB correctly balances dynamic performance and robustness to variation. If you must have a very high dynamic performance, you can tune to a sensitivity peak of 7 or 8 dB.
WARNING: If you use a sensitivity peak of 7 or 8 dB, small changes to the plant can cause the axis to become unstable. These types of changes include a variable payload and increased friction.
If it is not necessary for you to have a very high dynamic performance and you want the axis to be highly robust to changing conditions, you can tune to a sensitivity peak of 4 or 5 dB.
Feedforward Filtering
Although the feedforward gains do not change the stability of an axis, the feedforward control effort that is generated from high-dynamic motion or non-smooth profiles can excite mechanical resonances and cause unwanted oscillations in the position feedback. If the axis oscillates during your move profile at a known resonant frequency and the magnitude of the sensitivity response does not have a peak above 6 dB at that frequency, it might be possible to decrease the oscillation amplitude. You can do this by adding a low-pass filter or a notch filter to the feedforward path.
Tune Multi-Axis Systems
When you are tuning multi-axis systems, make sure that you tune the axis that is at the top of the stack first. Then continue to tune the axes downstream.
Retune the Servo Loop for Payload Changes
When you change the payload on an axis, it might be necessary for you to retune the servo loop. This is typical for tuning profiles that have aggressive stability margins.
Examine the Data
In the Frequency Response module, the first tab above the plot area shows the unsaved frequency response plots. Each time that you measure a new frequency response, the application adds a new plot to the Unsaved Plots drop-down menu.
You can access frequency response plots in all of the ways that follow:
- To open a saved frequency response plot file from the Windows file system, click
 .
. - To save a frequency response plot to the Windows file system, click the Save File button
 . When you save a frequency response, the application moves the plot from the Unsaved Plots drop-down menu to a file tab.
. When you save a frequency response, the application moves the plot from the Unsaved Plots drop-down menu to a file tab. - To save a frequency response plot as a CSV (comma-separated values) file, do the steps that follow:
- Click the drop-down arrow that is adjacent to the Save File button .
- Click the Save As button.
- On the File Type drop-down menu, select the CSV Files option. Then click Save.
IMPORTANT: You cannot open a CSV file in the Frequency Response module.
When you save an open plot that shows the measured and the shaped open-loop results, the application saves the measured result and the loop-shaping configuration in the Frequency Response file.
When you open a file that contains a loop-shaping configuration, the application loads the configuration and shows the shaped result.



