TrajectoryIirFilter Parameter
Default Value: 0
Minimum Value: 0
Maximum Value: None
Units: time milliseconds
Type: int
WARNING: This parameter can introduce errors in the programmed path of coordinated moves because it can change the position of an axis relative to another axis.
IMPORTANT: This parameter causes the controller to delay the motion trajectory of an axis, but does not delay I/O Functions and More PSO Functions on that axis. To compensate for the motion trajectory delay, use the DriveOutputCommandDelay Parameter to delay I/O functions and PSO functions.
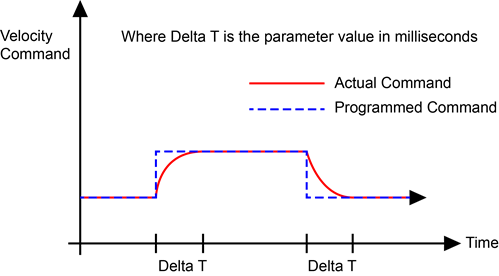
Use the TrajectoryIirFilter parameter to define the time constant of a first order, low pass Infinite Impulse Response (IIR) filter that is applied to the motion trajectory, smoothing sharp changes in the velocity. The value of this parameter corresponds approximately to the time interval over which an impulse, or instant change, in position occurs. A value of zero deactivates the filtering, while larger values produce more filtering and lower accelerations.