MotionUpdateRate Parameter
Default Value: 1
Minimum Value: 0.02
Maximum Value: 100
Units: khz
Type: double
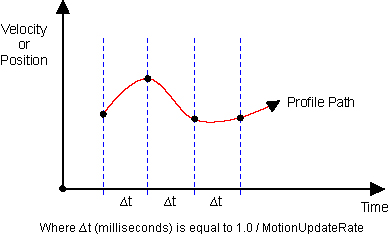
Use the MotionUpdateRate parameter to specify the rate of calculated position and velocity points that the controller generates. This parameter applies to coordinated motion, which is generated by functions such as MoveLinear(), MoveCw(), and MoveCcw(). And it applies to rapid motion, which is generated by the MoveRapid() function.
You can also use the MotionUpdateRate parameter to specify the time resolution of the MoveDelay() function.
On a drive-based controller, you can set the value of the MotionUpdateRate parameter to 1, 10, or 20 kHz. On a PC-based controller, you can set the value of the MotionUpdateRate parameter to 1, 10, 20, 50, or 100 kHz. The default rate is 1 kHz. If you command motion at a high speed and acceleration, set this parameter to a higher rate.
If the value of this parameter is less than the position update rate of an axis, the controller interpolates motion to the position update rate. To interpolate motion, the controller uses the cubic-spline polynomial algorithm that you specified for the MotionInterpolationMode Parameter.
If the value of this parameter is greater than or equal to the position update rate of an axis, interpolation does not occur. In this condition, the controller generates motion at the position update rate.
For more information about the position update rates of different drive types, refer to the table that follows.
| Drive Type | Position Update Rate | |
|---|---|---|
| Servo Axis | FLEX, iHXA4, HXA4, iXA4, and XA4 | 10 kHz |
| All others | 20 kHz | |
| Galvo Axis | 100 kHz | |
Figure: MotionUpdateRate Parameter Effect