Stepper Motor Phasing
A three phase stepper motor can be run with or without an encoder.
Without an Encoder: You do not need to phase the motor.
With an Encoder: Because the end of travel (EOT) limit inputs are relative to motor rotation, it is important to phase the motor.
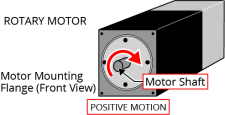
Run a positive motion command. The motor is phased correctly if there is a positive scaling factor (determined by the ServoLoopSetup parameter) and the motor moves in a clockwise direction when you view the motor from the front mounting flange (Positive Motor Direction). If the motor moves in a counterclockwise direction, reverse the motor leads and re-run the command. After the motor has been phased, if you want to change the direction of positive motion, use the ReverseMotionDirection parameter.
Figure 2-13: Positive Motor Direction