Sine Wave Encoder (Primary) [-MX2/-MX3 Option]
The Sine Wave Encoder option provides higher positioning resolution by subdividing the fundamental output period of the encoder into smaller increments. The amount of subdivision is specified by the PrimaryEncoderMultiplicationFactor parameter. Use Encoder Tuning to adjust the value of the gain, offset, and phase balance controller parameters to get the best performance. For more information, refer to Automation1 Help.
High resolution or high-speed encoders can require increased bandwidth for correct operation. Use the High Speed Mode of the PrimaryEncoderMultiplierSetup parameter to enable the high bandwidth mode. Because this mode increases sensitivity to system noise, use it only if necessary.
The drive can generate emulated encoder signals. These signals can be output on the Auxiliary Encoder (AUX) connector, SYNC port connector, or used internally by the PSO. Refer to the PrimaryEmulatedQuadratureDivider parameter and the encoder output functions in Automation1 Help for more information.
For the highest performance, use twisted pair double-shielded cable with the inner shield connected to signal common and the outer shield connected to frame ground. Do not join the inner and outer shields in the cable.
Table 2-18: Sine Wave Encoder Specifications
|
Specification |
Value |
||
|---|---|---|---|
| Primary | Auxiliary | ||
|
Input Frequency (max) |
450 kHz, 2 MHz |
450 kHz | |
|
Input Amplitude (1) |
0.6 to 1.75 Vpk-pk |
||
|
Interpolation Factor (max) |
-MX2 |
65,536 |
N/A |
|
-MX3 |
65,536 |
16,384 |
|
|
-MX2/-MX3 Primary Encoder Channel Interpolation Latency |
800 nsec (analog input to quadrature output) |
||
|
Input Common Mode |
1.5 to 3.5 VDC |
||
|
(1) Measured as SIN(+) - SIN(-) or COS(+) - COS(-) |
|||
Figure 2-17: Sine Wave Encoder Phasing Reference Diagram
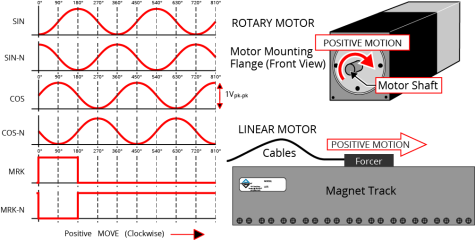
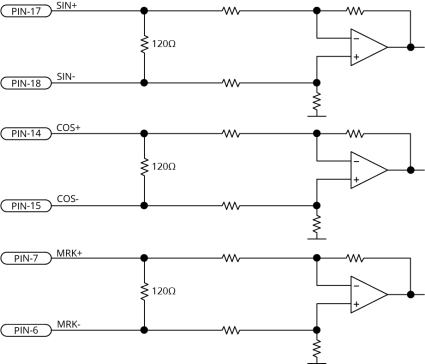
Figure 2-18: Sine Wave Encoder Schematic (Feedback Connector)