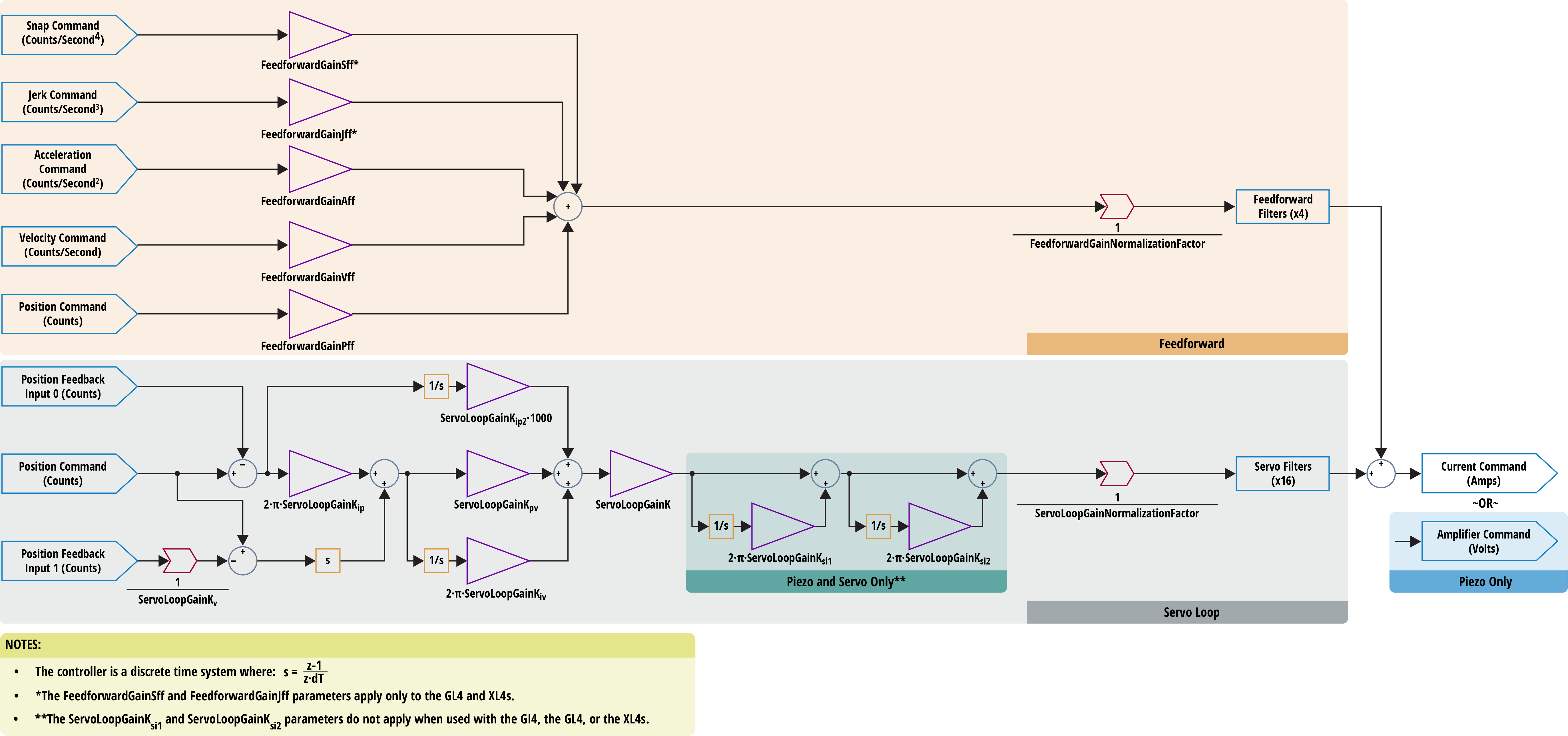
Servo Loop Block Diagram - Full
The diagram that follows shows the full servo loop for the Automation1 drives.
The units of the servo loop output depend on the type of axis being controlled. Refer to the table that follows.
Table: Servo Loop Axis Type, Output, and Units
| Axis Type | Servo Loop Output and Units |
|---|---|
|
Piezo axis |
Amplifier command in Volts. |
|
Stepper axis |
Commutation angle in microsteps. |
|
All other axes |
Current command in Amps. When the servo loop output is a current command, the current loop is used to generate the amplifier command in Volts. For more information, refer to Digital Current Loop Block Diagram. |
IMPORTANT: The units of ServoLoopGainK Parameter are determined by the ServoLoopGainNormalizationFactor. If ServoLoopGainNormalizationFactor is configured correctly, the units of ServoLoopGainK are in engineering stiffness units ([N/mm], [(Nm/rad], etc.). Refer to ServoLoopGainNormalizationFactor Parameter for more information.
IMPORTANT: The units of FeedforwardGainAff Parameter are determined by the FeedforwardGainNormalizationFactor. If FeedforwardGainNormalizationFactor is configured correctly, the units of FeedforwardGainAff are in engineering stiffness units ([kg], [kg•m2], etc.). Refer to FeedforwardGainNormalizationFactor Parameter for more information.
Tip: For information on how to set the parameters, refer to the Help topic for each parameter.
Figure: Servo Loop Block Diagram - Full